
A few months ago, trying to find an use for a new LEGO brick found in NEXO Knights sets, I made my first omni wheel. It worked but it was to fragile to be used in a robot so I decided to copy one of Isogawa’s omni wheels and keep working on an holonomic robot with 3 wheels.
Why 3 wheels?
At first I only had NEXO parts to build 3 wheels but I enjoyed the experience – my first RC experiments seemed like lobsters. Controlling the motion is not easy but I found a very good post from Miguel from The Technic Gear so it was easy to derive my own equations. But Power Functions motors don’t allow precise control of speed so I could not make the robot move in some directions. I needed regulated motors like those used with MINDSTORMS EV3.
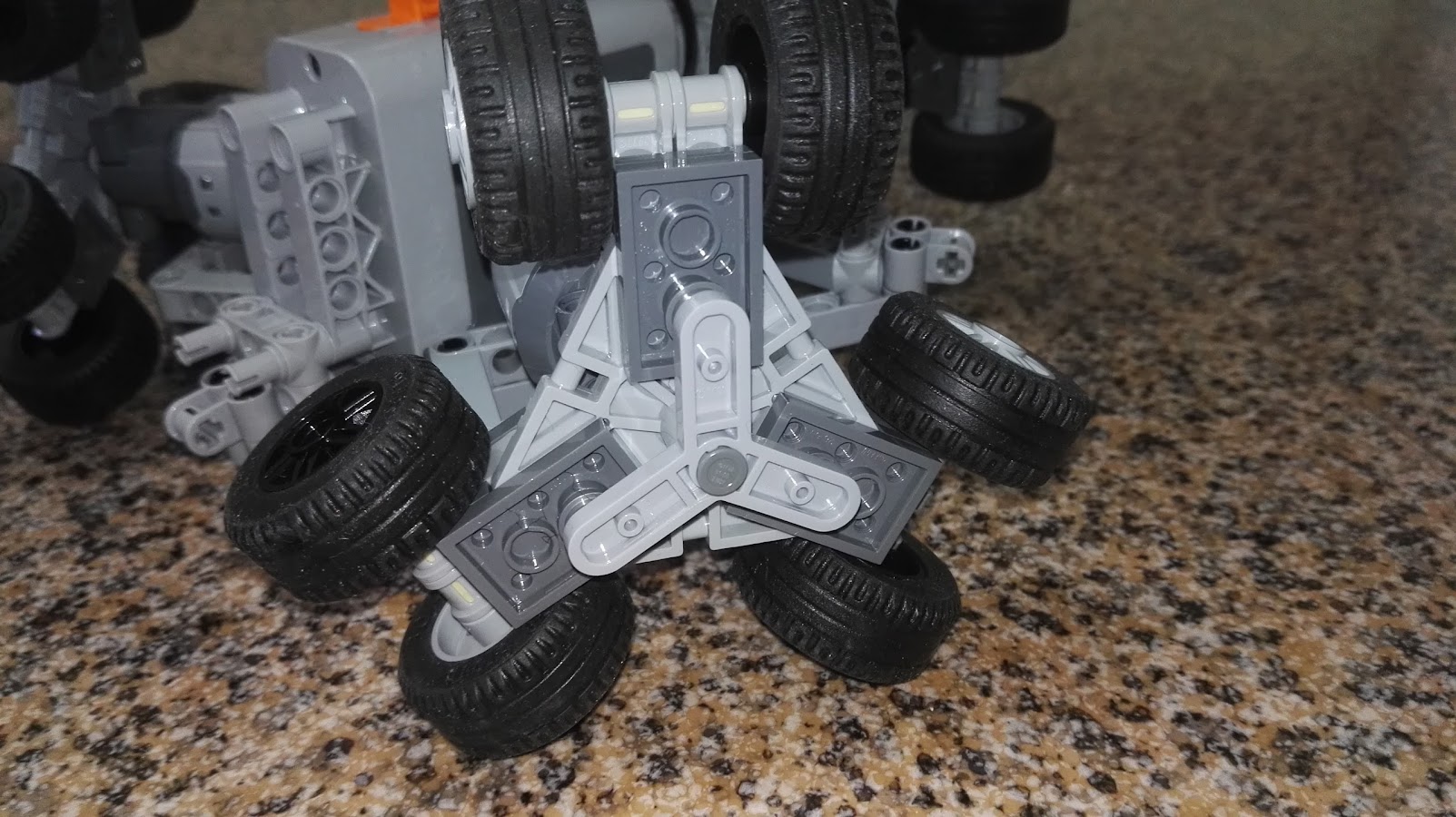
So after assembling three Isogawa’s omniwheels and making a frame that assured the wheel doesn’t separate from the motor it was just a matter of making a triangled frame to join all 3 motors and sustain the EV3:
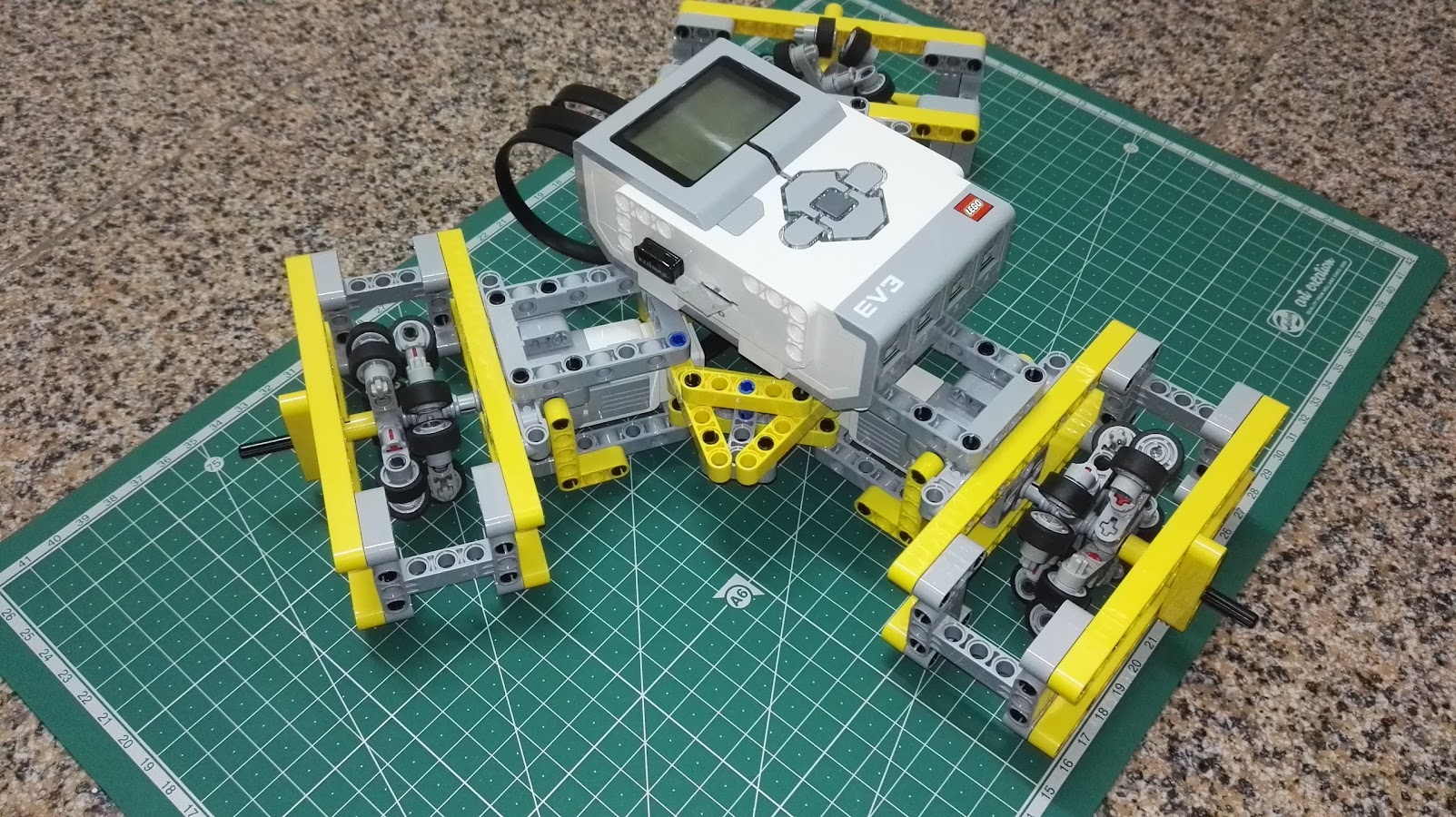
First tests with regulated motor control seem promising: Triplex is fast enough and doesn’t fall apart. It drifts a bit so I’ll probably use a gyro sensor or a compass to correct it.
In this demo video I show Triplex being wireless controlled from my laptop keyboard through an SSH session. It just walks “forward” or “backward” (only two motors are used, running at the same speed in opposite directions) or rotates “left” or “right” (all motors are used, running at the same speed and the same direction).
For the code used in this demo I copied a block of code from Nigel Ward’s EV3 Python site that solved a problem I’ve been having for a long time: how do I use Python to read the keyboard without waiting for ENTER and without installing pygame or other complex/heavy library?
#!/usr/bin/env python3
# shameless based on
# https://sites.google.com/site/ev3python/learn_ev3_python/keyboard-control
#
import termios, tty, sys
from ev3dev.ev3 import *
TIME_ON = 250
motor_A = MediumMotor('outA')
motor_B = MediumMotor('outB')
motor_C = MediumMotor('outC')
#==============================================
def getch():
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
tty.setcbreak(fd)
ch = sys.stdin.read(1)
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
return ch
#==============================================
def forward():
motor_A.run_timed(speed_sp=-1200, time_sp=TIME_ON)
motor_C.run_timed(speed_sp=1200, time_sp=TIME_ON)
#==============================================
def backward():
motor_A.run_timed(speed_sp=1200, time_sp=TIME_ON)
motor_C.run_timed(speed_sp=-1200, time_sp=TIME_ON)
#==============================================
def turn_left():
motor_A.run_timed(speed_sp=1200, time_sp=TIME_ON)
motor_B.run_timed(speed_sp=1200, time_sp=TIME_ON)
motor_C.run_timed(speed_sp=1200, time_sp=TIME_ON)
#==============================================
def turn_right():
motor_A.run_timed(speed_sp=-1200, time_sp=TIME_ON)
motor_B.run_timed(speed_sp=-1200, time_sp=TIME_ON)
motor_C.run_timed(speed_sp=-1200, time_sp=TIME_ON)
#==============================================
print("Running")
while True:
k = getch()
print(k)
if k == 'a':
forward()
if k == 'z':
backward()
if k == 'o':
turn_left()
if k == 'p':
turn_right()
if k == ' ':
stop()
if k == 'q':
exit()
Thanks for sharing Nigel!
Now let’s learn a bit of math with Python.
For those who might interest, I also have some photos with the evolution of the project.