
- IoT monorail (LEGO-compatible)
When I was young never had the chance to get a LEGO monorail.
I still feel sad knowing that LEGO will never produce the monorail again but at least I can now buy some used monorail parts at Bricklink stores. Expensive so I also decided to buy some custom 3D-printed parts from 4DBrix. Great, I’m gathering a small monorail system that soon will be automated with LEGO MINDSTORMS or/and Raspberry Pi.
But what I would really love to find is someone selling custom motors, compatible with the rail teeth. LEGO probably had its reasons to choose a gear and rack combination non-compatible with the LEGO Technic system but that makes it difficult to re-use the rails with current Power Function, Technic or even MINDSTORMS products.
Others have embraced this problem designed a completely new rail system totally LEGO-based, like Masao Hidaka amazing work. But always tender the idea of finding a compatible gear that I could use with a LEGO motor or at least with a small general motor so that I could create my own monorail engine and use the LEGO monorail tracks (and 4DBrix aswell).
So I found that gear. In fact I’ve found several gears.
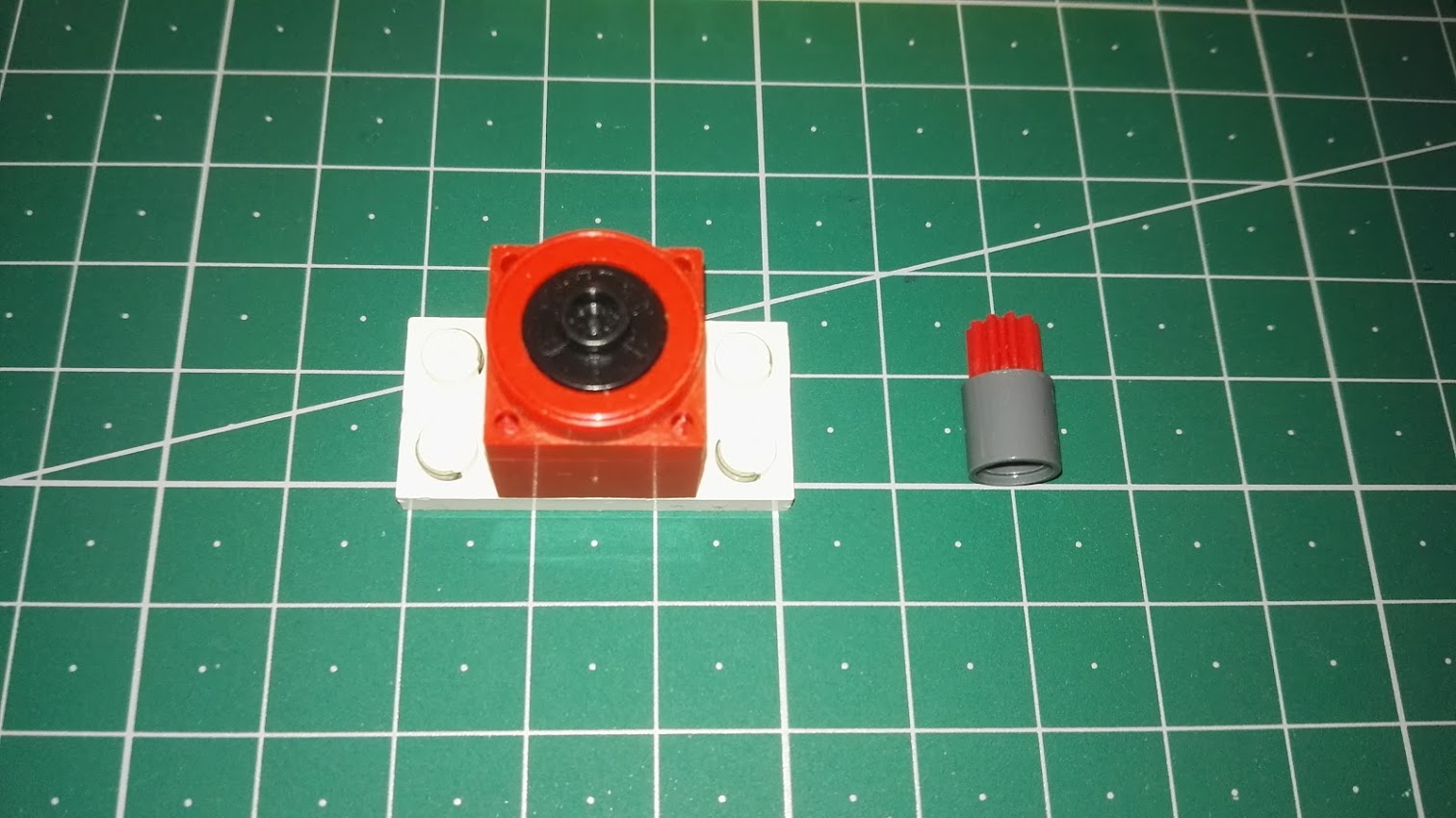
The LEGO monorail engine gear is a 12-teeth metal gear with more or less a 6.9 mm diameter:

I never found an exact match. But I did find several smaller gears, with different number of teeth, that work very well. I chose a 10-teeth gear from a Cebek C-6086 kit available at a portuguese robotics shop:

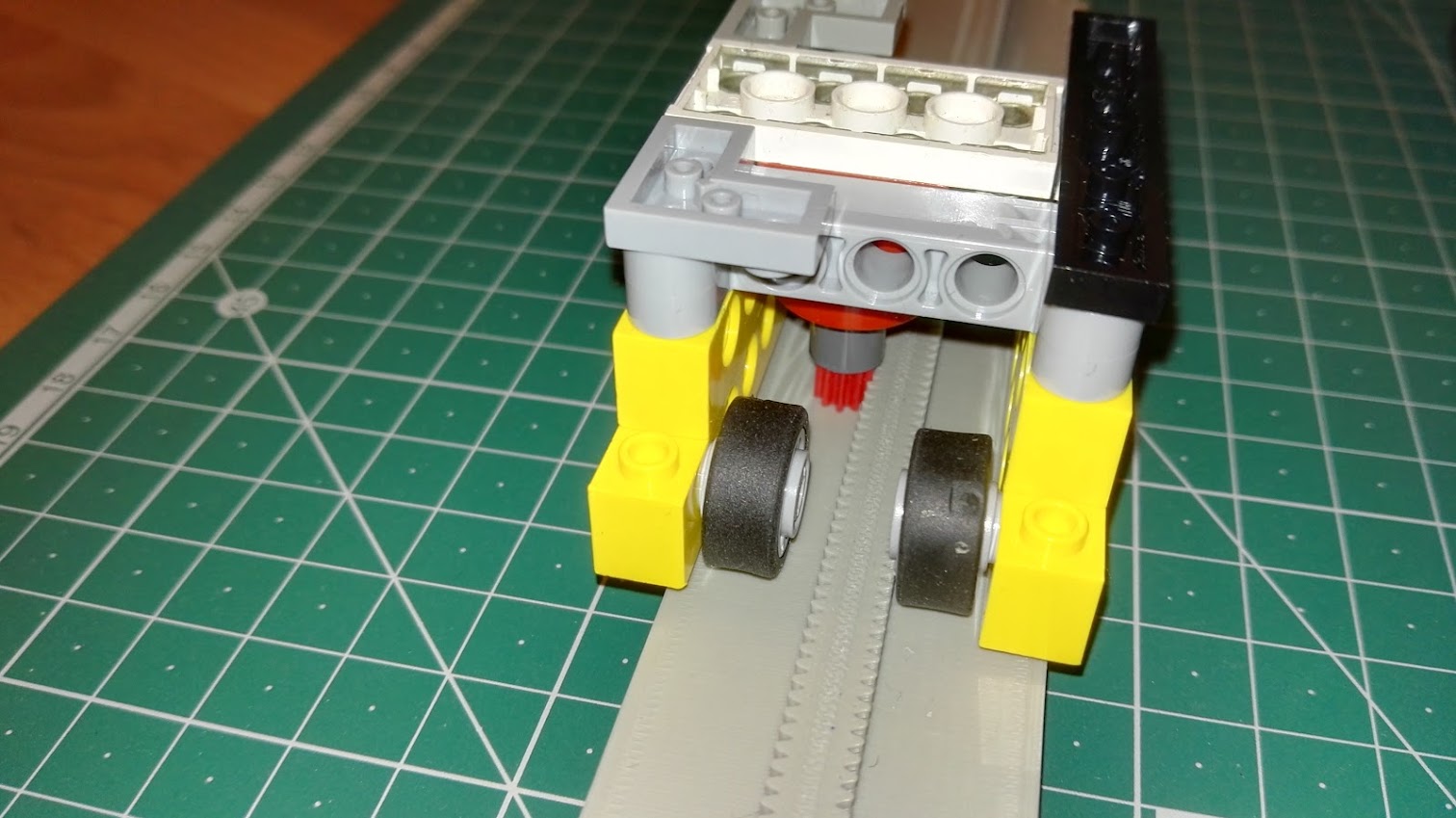
So I started gluing this small gear to a LEGO Technic piece that fits in the old micro-motor:
To my surprise, this actually worked quite well, although too bulky and somewhat slow:
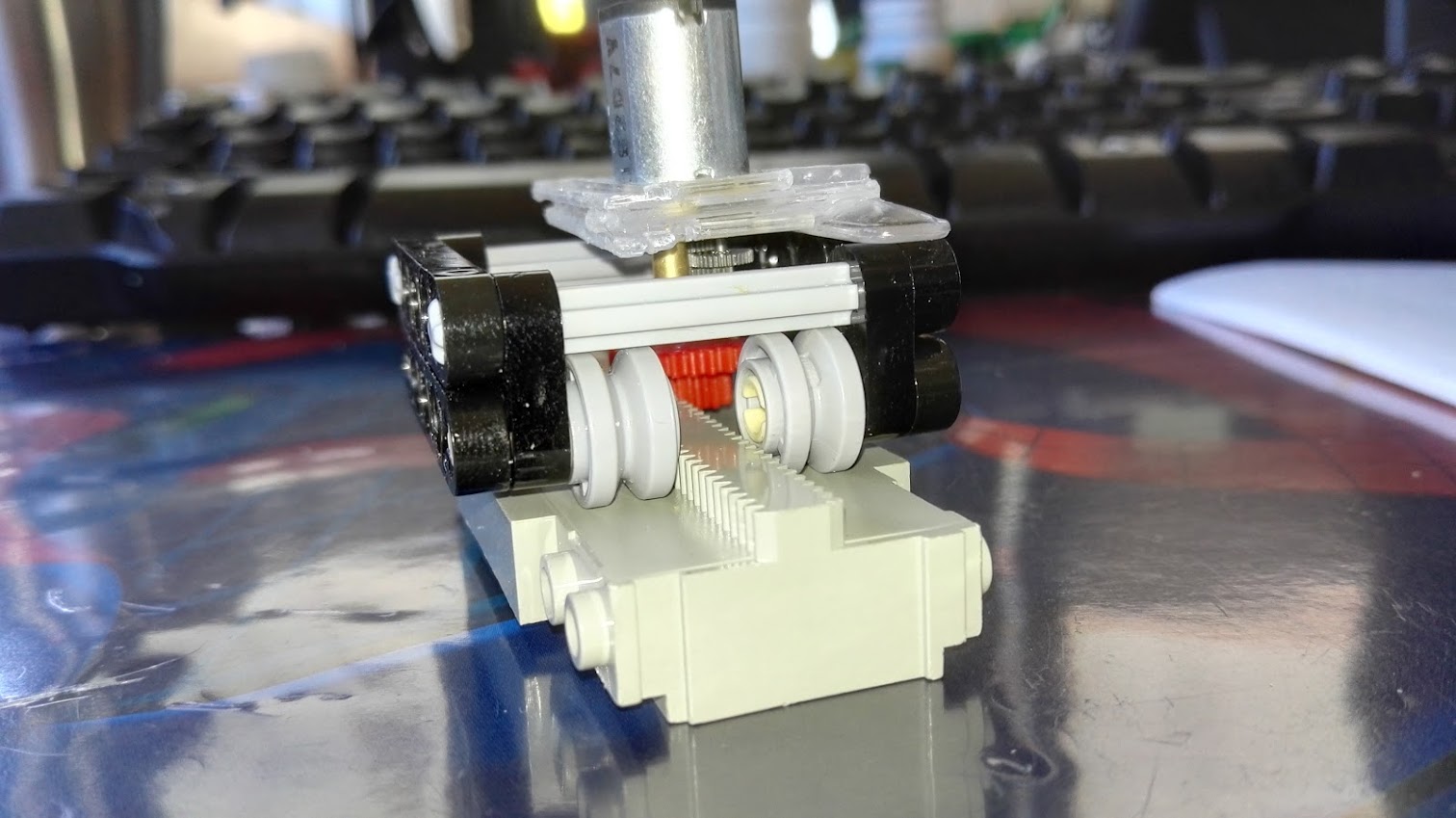
So I decided to use a small Pololu #1095 geared motor I have from previous experiments with IoT LEGO vehicles:

I don’t have a 3D printer and I’m also not good at 3D designing so I started using small scraps of plastic and cyano glue to create my own Technic adapter and after a few tries I already had something:

(I used another gear because the first one didn’t fit in the motor shaft)
With two small LiPo batteries it worked fine on straight tracks but not so well with curved tracks:
So after another few tries I finally got my first working prototype:
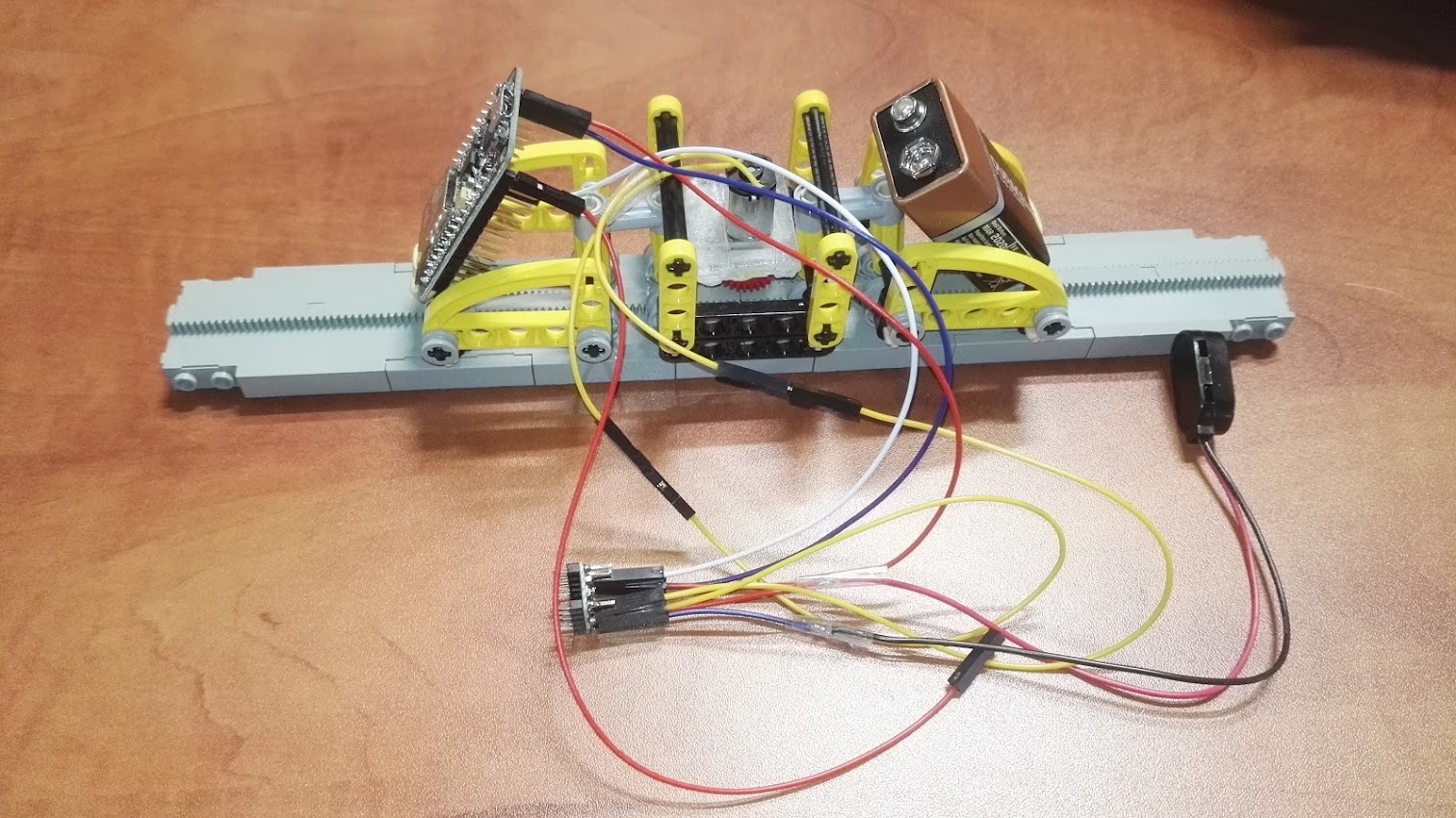
It uses a NodeMCU (ESP-12E) microcontroller board running a small HTTP server so I turn the motor ON/OFF from a browser or with wget commands like these bash script used on the next video:
#!/usr/bin/env bash wget http://10.26.10.93/gpio/1 -O /dev/null sleep 6.0 wget http://10.26.10.93/gpio/0 -O /dev/null
Will post more details later. For now this is the part list:
- NodeMCU (ESP-12E) microcontroller
- DRV8838 motor driver
- Pololu #1095 geared micro-motor
- PP3 9V battery
- PP3 connector
- jumper wires
- LEGO Technic pieces
- UHU tack
- cyano glue and plastic coffee spoons