Carregador Parede 2Hix 4*Usb (2*2.4A+2*1.0A) Preto
Already tried a 3A model but it was a dual USB port and no info about each port limit, I suspect it is 1.5A for each.
So I started charging my EV3 again, with ev3dev running. But removed the USB hub and the CRS 4.0 dongle, left just the Edimax wi-fi dongle. Also disconnected 2 large EV3 motors I had:
162666
163 mA (43 mA less than previous attempts)
Is started from last night “full” charge with same Qi emitter and receiver (but EV3 OFF), 7.23 Volt
7232133
After 45 minutes it charged to 0.1 V more (7330466). After that it slowed down but still charge up to 7350466 exactly 1h57m after.
Then it started to behave strangely again, discharging to 7262466 after another 35 minutes. Then it stayed there for the next 20 minutes.
Both RED and GREEN lights are ON (EV3 battery). And the Qi devices seem coupled.
7.26V is just 0.03V more than last night “full” charge result. Perhaps it is the best I can get with the boost circuit’s output trimmed to 9.02V.
If that’s the limit, then using a better USB charger and/or reducing EV3 current consumption by 43 mA helped. But it still isn’t enough for a mobile robot, adding a couple of motors and sensors will raise consumption above the nearby threshold and the robot will just discharge slower until it shuts down.
I wish the EV3 had a Real Time Clock and wake up function. Crazy ideas accepted 🙂
The Qi emitter is using a 2A USB charger. The LED shows it is coupled with the Qi receiver. For the first 15 minutes or so it charges a bit but no more that 0.1V… then it starts discharging. After 3 hours, the ev3dev turns itself OFF.
Tried a different Qi emitter. Also a few different USB chargers. The Qi emitter gets hot. Sometimes one of them blinks, I thought it was a coupling problem but now I think it is an overcurrent or thermal protection…
Not sure about the efficiency of this Qi couple and also not sure about the efficiency of the boost circuit… I suspect that I need more than 2A through the emitter to get a full charge and they can’t handle it more than a few minutes and then they “throttle” current.
I trimmed the boost circuit to give 9.02 V instead of 10.02 V. Less voltage should mean more current available but didn’t notice any effect.
Last night I left the battery charging with EV3 off (it had not enough charge for ev3dev to keep running) . This morning the GREEN light was ON and the RED was off so it charged. Turning EV3 ON it reported
7263733
So the battery is not quite full charged but much better than what I get with EV3 ON.
With a small 4-port USB hub, an Edimax wi-fi dongle and a CSR 4.0 BT/BLE dongle the ev3dev reports 208 mA
I plan to get a current meter and watch consumption with several dummy loads. Perhaps I can tune my gadget a bit but I think I’ll have to find a better Qi receiver (and probably also a better Qi emitter).
So, for now, Juan’s idea of using this for charging an autonomous Ev3 robot is paused. The better we can do is bringing the robot to the charging point and turn it OFF to let it charge. But someone has to go there to turn it ON again after charging is complete.
New classes are available for coordinating motors: ev3dev2.motor.MotorSet, ev3dev2.motor.MoveTank, ev3dev2.motor.MoveSteering, and ev3dev2.motor.MoveJoystick.
Classes representing a variety of motor speed units are available and accepted by many of the motor interfaces: see our docs to learn more.
Friendlier interfaces for operating motors and sensors: check out ev3dev2.motor.Motor.on_for_rotations and the other on_for_* methods on motors.
Easier interactivity via buttons: each button now has wait_for_pressed, wait_for_released and wait_for_bump
Improved ev3dev2.sound.Sound and ev3dev2.display.Display interfaces
New color conversion methods in ev3dev2.sensor.lego.ColorSensor
It’s a “Targus Bluetooth v4.0 Dual-mode Dongle ACB75A” that is sold at Staples.
dmesg:
usb 1-1: new full-speed USB device number 9 using xhci_hcd
usb 1-1: New USB device found, idVendor=0a5c, idProduct=21e8
usb 1-1: New USB device strings: Mfr=1, Product=2, SerialNumber=3
usb 1-1: Product: BCM20702A0
usb 1-1: Manufacturer: Broadcom Corp
usb 1-1: SerialNumber: 5CF370878D54
Bluetooth: hci1: BCM: chip id 63
Bluetooth: hci1: BCM: features 0x07
Bluetooth: hci1: BCM20702A
Bluetooth: hci1: BCM20702A1 (001.002.014) build 0000
bluetooth hci1: Direct firmware load for brcm/BCM20702A1-0a5c-21e8.hcd failed with error -2
Bluetooth: hci1: BCM: Patch brcm/BCM20702A1-0a5c-21e8.hcd not found
I got my script working with 6 LEGO BLE devices. And 7. And even 8:
But latency isn’t great (with 8 I had to decrease the loop period from 1 second to 0.25 to prevent connection drops and even send the initial command twice to the Handset to hold the session) so even if it supports 14 sessions I doubt that we can make good use of 14 LEGO LPF2 hubs with just one dongle.
To reduce latency we can add more dongles. But even so, when a command takes 0.2 to 0.3 seconds to complete before we can send the next one, it’s hardly interesting for robotics. A Powered Up based robot will require a real autonomous device, able to read its own sensors and react on the fly, not with half a second round trip delay to the “brain”.
Also tried the script without the firmware. It works but with a few “connect error: Function not implemented (38)”.
And also re-tried the Cambridge CSR 4.0. It clearly states that it can’t handle the sixth: “connect error: Too many links (31)”
About two years ago I had a dual SBrick “train” setup controlled with my EV3. I never really got much far because there were some hiccups when using one USB BLE dongle to control two SBrick at the same time that didn’t occur with my Ubuntu laptop (same dongle, a CSR 4.0).
By that time, the ev3dev had a BlueZ stack much older than my Ubuntu so I decided to wait and as usual I forgot about it.
Today I’m testing how many Powered Up hubs I can control at the same time with just one BLE “client”. Just a simple bash script, changing the RGB LED colors of the hubs at the same time.
My laptop could control 2. But started to had issues with 3, failing some commands:
Characteristic Write Request failed: Request attribute has encountered an unlikely error
Perhaps sending 3 gatttool commands in-a-row was too much so added a small delay. It got worst:
connect error: Connection timed out (110)
Tuning to a small delay (0.03) seems to be the best but is strange.
Now this laptop is no longer the same I had and it now has an onboard BLE 4.2 chipset, from Intel. Not sure which version.
But I still have the CSR 4.0 dongle on the Ev3 over the desk. So let’s try same script with it.
No errors at all. Not even with 0 delay.
These last years David has been doing a great job with ev3dev kernel so my EV3 and my Ubuntu laptop are now pretty close: (4.14.58-ev3dev-2.2.1-ev3 against 4.15.0-29-lowlatency #31-Ubuntu SMP PREEMPT) so I don’t think this is a BlueZ issue.
I read somewhere that CSR 4.0 allows 5 sessions. So I need to test my script again with more LEGO hubs. But wonder why the Intel only handles two.
Buy the way, controlling 2 Powered Up “Hub NO.4” and 1 BOOST “Move Hub” at the same time from a single EV3 is already pretty good (if the old hiccups problems are fixed): that’s potentially 8 more motors!
I have news, because i did a test. The Broadcom BCM20702 Bluetooth Dongle can handle up to 14 BLE device connections simulateous.
And overall it’s a lot faster than this one from Cambridge Silicon Radio (can handle a max. of 5 BLE device connections simulateous).
Need to search my drawers… almost 100% sure I had a Broadcom LE USB dongle that gave up because ev3dev didn’t like it as much as the Cambridge CSR.
Also Raspberry Pi is Broadcom… time to get back to BrickPi3.
I hope Spock is right because I’m not sure if an headache is a sign of wisdom
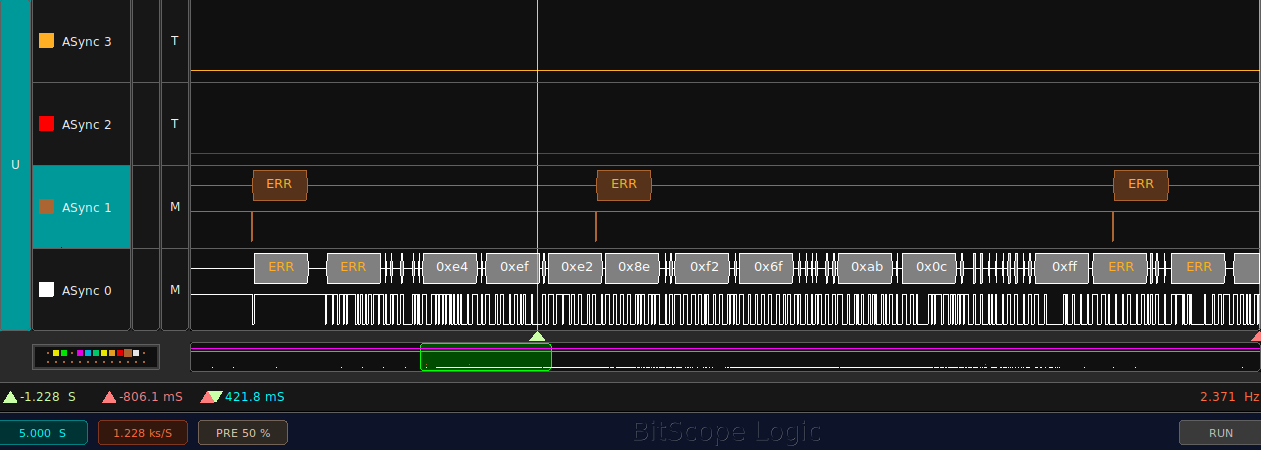
First capture
So the only affordable Logic Analyser that works with Linux and I could get nearby to get rid of portuguese evil customs was the BitScope Micro (BS05).
Installation on Ubuntu was easy (amazing how things evolved!) and it works. Documentation isn’t great but it is enough.
Now the tough part: finding sense in all captured data. 300 baud inverted seems… something.
The BT address is not a LEGO one like the BOOST (00:16:53, “LEGO System A/S IE Electronics Division”) or the Powered Up (90:84:2B, “LEGO System A/S”). It’s a Texas Instruments chipset, probably something like the CC2640, a ARM microcontroller with embedded BLE functions.
The usual browsing of properties with gatttool reveals 3 primary services and a few characteristics:
primary
attr handle: 0x0001, end grp handle: 0x0007 uuid: 00001800-0000-1000-8000-00805f9b34fb
attr handle: 0x0008, end grp handle: 0x0008 uuid: 00001801-0000-1000-8000-00805f9b34fb
attr handle: 0x0009, end grp handle: 0xffff uuid: 00001623-1212-efde-1623-785feabcd123
The first primary service (1800, Genneric Access) has 3 chars:
Device Name: Handset
Appearance: Unknown
Peripheral Preferred Connection Parameters: Connection Interval: 100.00ms-200.00ms, Slave Latency:0, Supervision Timeout Multiplier: 1000
The second primary service (1801, Generic Attribute) is empty. Not unusual since it is optional.
The last primary service has the same UUID already present on BOOST and Powered Up hubs (i.e. “00001624-1212-efde-1623-785feabcd123”). And like those it has only one characteristic, “LWP ProtocolChar”.
(side note: LWP might mean Light Weight Process or LEGO Wireless Protocol or just Lets Worsen your Pain)
Thats good: since this “Handset” shares the same primary service UUID of the other PF2 / Powered Up devices, it might also work in the same way.
[edit]
Ooops, forgot that EV3 already has an internal BT interface. Sometimes this script works, sometimes don’t. That’s because I don’t specify which BT interface will be used by gatttool command. We should use ‘-i hci0’ or ‘-i hci1’ but sometimes the kernel decides that hci0 is the internal one, sometimes it decides that it is the USB one.
Perhaps a udev rule can force hci0 to always be the USB one, don’t know. Bad quickfix: remove the USB BT adapter and insert it again, this forces ev3dev to switch hci devices.